Hexapod
As an undergraduate student I was inspired by the legged robots built by Boston Dynamics, and decided to build one myself!
As the sole contributor towards the project I worked on the hardware and software aspects of it and learnt a lot through the process.
I have a guide on How I built a hexapod robot on Medium. It's a must read if you want to know more about my robot!
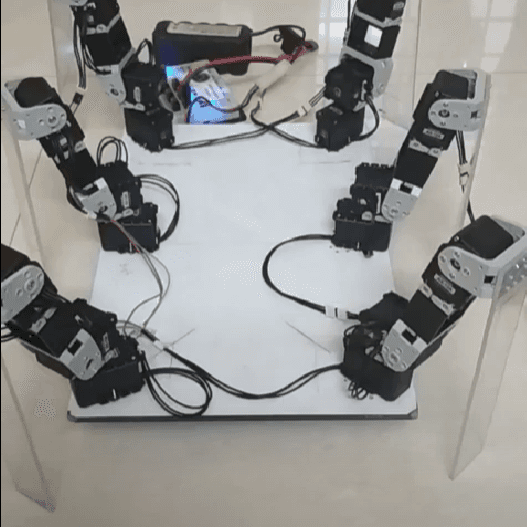
First iteration
stuff that I put together in a couple of days
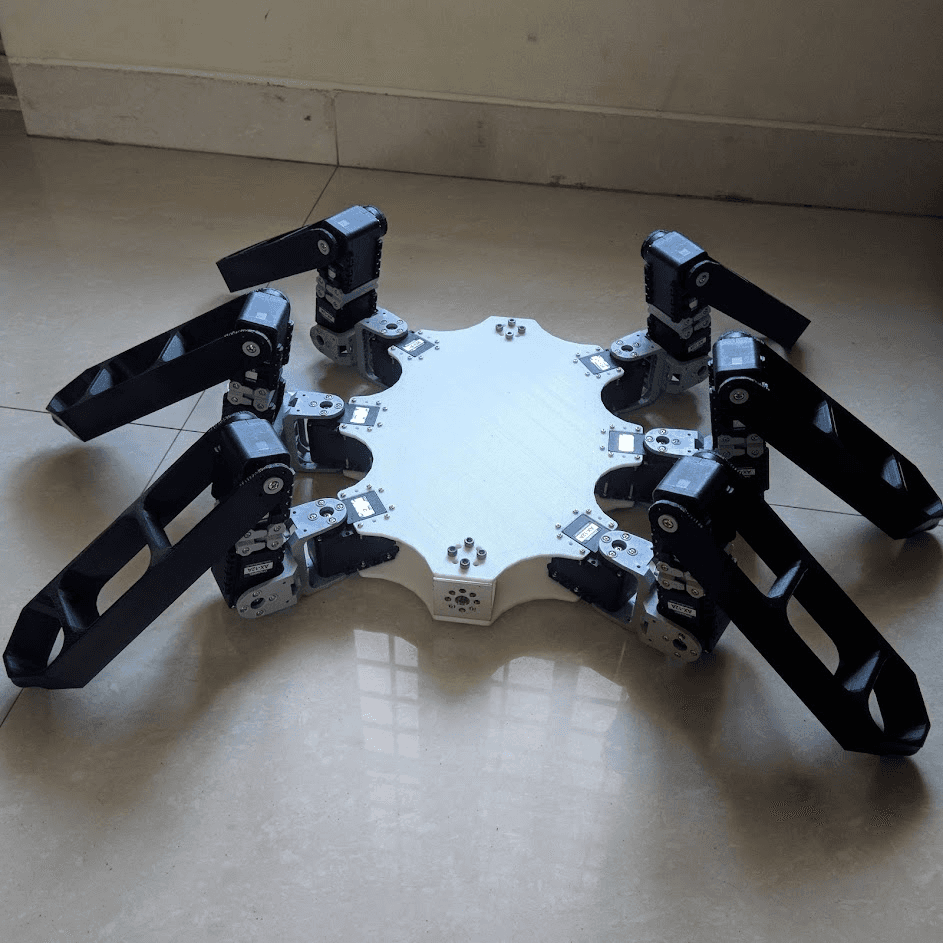
Second iteration
Got some parts 3d printed!

Final Design
With electronics and Hardware mounted!
As you can see above there is a clear difference between the shape of the robot from the second iteration to the final design! Though the legs are the same dimensions the way they were arranged spatially changed. I was pretty curious about how such differences affected the workspace of the robot, and under the guidance of professor G.Kalaiarassan we published a journal paper which investigated such differences!!