Refraction AI
I started working in Refraction as an intern and later transitioned into a full time employee. I met some amazing people, learned a lot and built some cool robots.
Firstly Refraction AI builds autonomous delivery robots. Unlike smaller sidewalk robots our robots travel on the road margin (bike lanes/ side of the road), which means we can be bigger and move faster.
Being in a startup and given my skillset, I worked on everything from building hardware to writing autonomy software. Below is a brief writeup of some of the stuff that Ive done (obviously I took permission before posting this stuff) :)
Initial Chassis Testing, I built up the rig to hold the sensor suite

Initial duct tape body, I built up the internals with pvc to hold it up

Testing model, made out of fabric (we used a shower curtain! cause it was waterproof)
I tried and tested out multiple body configurations, along with chassis configurations and door configurations before actually reaching to a conclusion for out final body design. Below are a few renders of what I tried out.

Initial render of body designs

Initial render of body designs
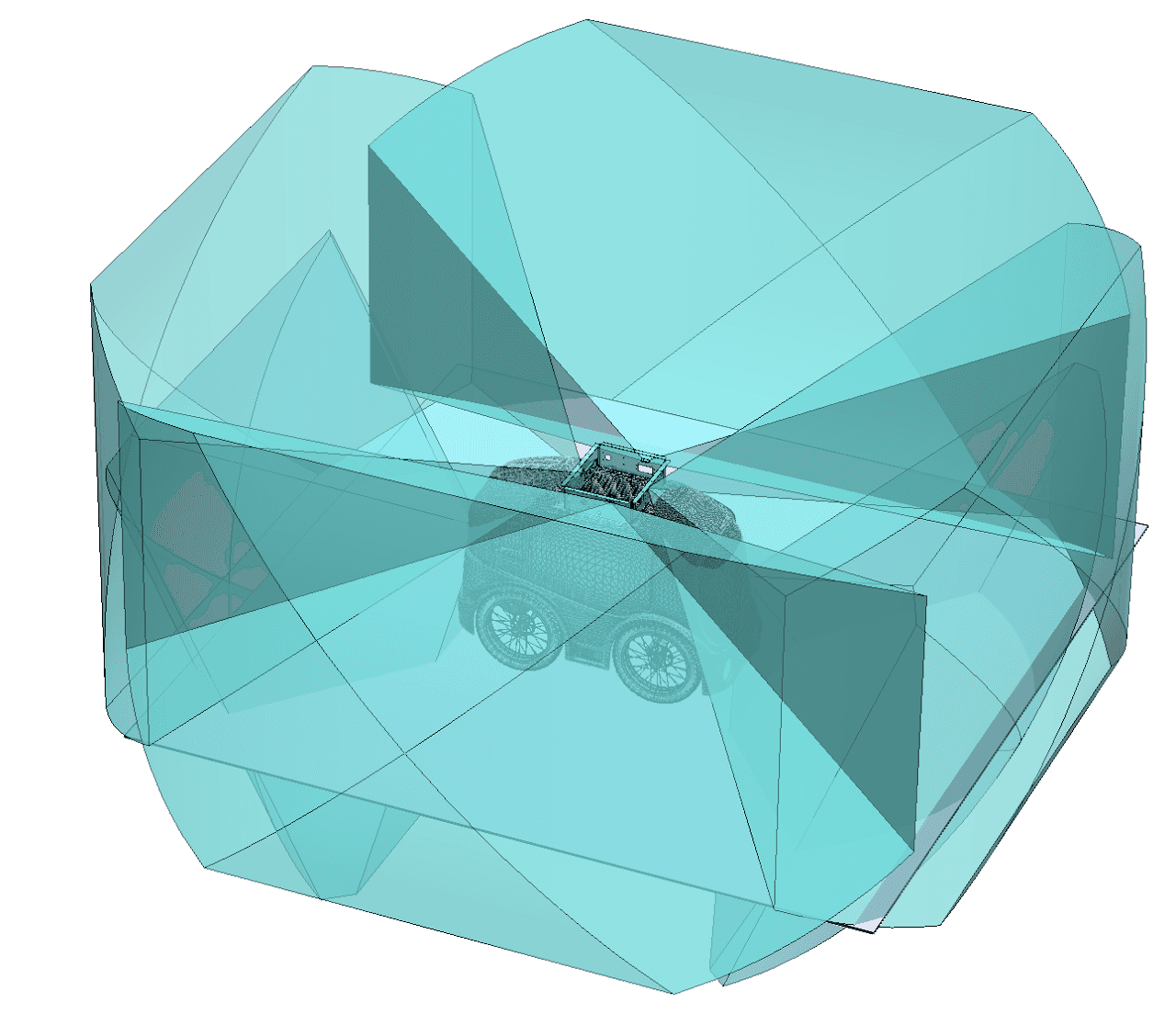
Sensor FOV depiction
The main subsystems I worked on the new platform was-
1. The brake subsystem
2. The steering subsystem
I designed them in house and got them manufactured. Both worked extremely well. I learned about bleeding brakes, found the perfect tolerance and assembly tactics :)
One of the other things I did as well, was help with assembly for the whole fleet of robots :) We unfortunately did not have the budget to get it outsourced and since I was part of the design team I volunteered to assemble the bots. This gave me amazing insight into what to change for the next iteration to make assembly quicker and faster. But yea with help from my teammates we had 12 bots up and running :)


Me literally in the bot :)
Testing out wire routing + electronics and controllers!

All our robots, from first generation (in the left) to third generation (in the right)
Robot testing
You have to keep in mind that we were a software focused company, so after deploying our 3rd generation platform I was back to writing autonomy software. I wrote some embedded code to add some features to the inbuilt keypad on the robot. It uses CAN and helped with robot proprietary functionality. Apart from this I worked on tuning the controllers for the robot so it drives as intended. I also worked on shaving down docker image sizes for streamlined deployment and accelerated iteration with minimal overhead.
UKF based lane tracking and reference line generation
Behind the scenes
The videos above essentially show the robot detecting lane lines using a neural network, projecting it to 3d and then tracking those lines based on a UKF. If you have more questions on this feel free to contact me :)
Well I did a lot more in refraction that I could not document here. We used a super small budget and built some pretty amazing things, and I will always be grateful for working there!!